





Sessions schedule and social program
| Time (UTC) | Monday 12 September 2022 |
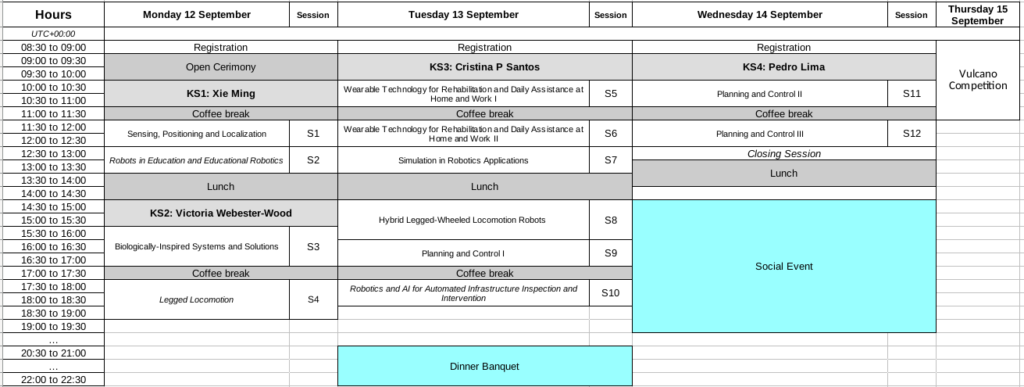
| 08:30-09:00 | Conference Registration |
| 09:00-10:00 | Opening Session |
| 10:00-11:00 | Xie Ming – Key Steps Toward Development of Humanoid Robots / Chair: Bryan Bridge |
| 11:00-11:30 | Coffee break |
| S1: Sensing, Positioning and Localization / Chair: Armando Mendes | |
| 11:30-11:45 | Fast Prototyping of a Low-Cost Three-Dimensional Force Sensor for the Six-Legged Walking Robot LAURON |
| 11:45-12:00 | Position estimator for a Follow Line Robot: Comparison of Least Squares and Machine Learning Approaches |
| 12:00-12:15 | Remote VDB-Mapping: A Level-Based Data Reduction Framework for Distributed Mapping |
| 12:15-12:30 | Experiment of Social Robot Collaboration (SRC): Vi-sion-based Object Segmentation, Localization and Segregation in a Public Interaction Event |
| S2: Robots in Education and Educational Robotics / Chair: Paulo Medeiros | |
| 12:30-12:45 | Machine Learning Application with AI-Robotics Tool – What we learned from pilot studies |
| 12:45-13:00 | Performing a planetary exploration mission from the classroom |
| 13:00-13:15 | Learning Hands-On Electronics from Home: A Simulator for Fritzing |
| 13:15-13:30 | Climbing a volcano: A new robotic competition |
| 13:30-14:30 | Lunch |
| 14:30-15:30 | Victoria Webster-Wood – It’s Alive! From Bioinspired to Biohybrid Robots / Chair: Ana Rodrigues |
| S3: Biologically-Inspired Systems and Solutions / Chair: Victoria Webster-Wood | |
| 15:30-15:45 | Power to the springs: Passive elements are sufficient to drive push-off in human walking |
| 15:45-16:00 | Grasping Characteristics of Flexible Propulsion Unit Using Braid Mechanism for Lunar Exploration Robot |
| 16:00-16:15 | Bio-inspired Imprecise Impedance Control of Muscle-driven Robotic Limbs |
| 16:15-16:30 | Tegotae-based Control for Non-animal-like Locomotion: a Case Study with Trident Snake |
| 16:30-16:45 | Soft gripper with adjustable microspines for adhering to tree branches |
| 16:45-17:00 | Exploiting friction anisotropy for soft robot locomotion |
| 17:00-17:30 | Coffee break |
| S4: Legged Locomotion / Chair: Joana Figueiredo | |
| 17:30-17:45 | Bridging the Reality Gap via Progressive Bayesian Optimisation |
| 17:45-18:00 | A Review of Current Approaches to Configuration Detection in Modular Legged Robots |
| 18:00-18:15 | Design and Mixed-Reality Teleoperation of a Cuadruped-Manipulator Robot for SAR Tasks |
| 18:15-18:30 | On the Kinematic Characteristics of Walking Mechanisms of Mobile Robots with Walking Propulsion Devices |
| 18:30-18:45 | Learning energy-efficient trotting for legged robots |
| Tuesday 13 September 2022 | |
| 08:30-09:00 | Conference Registration |
| 09:00-10:00 | Cristina Santos – Developing Biomedical devices / Chair: Osman Tokhi |
| S5: Wearable Technology for Rehabilitation and Daily Assistance at Home and Work I / Chair: Cristina Santos | |
| 10:00-10:15 | Wearable virtual reality tool for balance training: the design and validation on healthy |
| 10:15-10:30 | Effect on Jumping Height by Changing Jumping Powered Exoskeleton Attachment Position for Augmentation of Human Instantaneous Movements |
| 10:30-10:45 | Evaluation of Support Device for Manual Handling of Gas Cylinders |
| 10:45-11:00 | Rehabilitation Device for lower limbs through virtual training and electrical acupuncture stimulation |
| 11:00-11:30 | Coffee break |
| S6: Wearable Technology for Rehabilitation and Daily Assistance at Home and Work II / Chair: Joana Figueiredo | |
| 11:30-11:45 | Wearable Lower Limb Neuroprosthesis: System Architecture and Control Tuning |
| 11:45-12:00 | Comparative analysis of walking in the lower limbs’ exoskeleton with various strategies for constructing the ankle joint’ trajectories |
| 12:00-12:15 | Adaptive navigation control of an active smart walker |
| 12:15-12:30 | Human models simulating the physical conditions of the elderly individual and standing assistance method based on these models |
| S7: Simulation in Robotics Applications / Chair: Armando Mendes | |
| 12:30-12:45 | Modelling of a Vibration Robot using localization ground truth assisted by ArUCo Markers |
| 12:45-13:00 | Modelling and Simulation of Robotic Luggage Transport at OPO Airport |
| 13:00-13:15 | Simulation and digital twin of a robotic sanitizing process of environments at risk during the pandemic |
| 13:15-13:30 | Common Information Model for Modules of Service Robots |
| 13:30-14:30 | Lunch |
| S8: Hybrid Legged-Wheeled Locomotion Robots / Chair: Vítor Pinto | |
| 14:30-14:45 | A Survey of Wheeled-Legged Robots |
| 14:45-15:00 | Performance evaluation of an innovative suspension system for obstacle crossing |
| 15:00-15:15 | Autonomous Wheeled Locomotion on Irregular Terrain with Tactile Sensing |
| 15:15-15:30 | Control of Wheeled-Legged Quadrupeds using Deep Reinforcement Learning |
| 15:30-15:45 | Design Optimization of a Four-Bar Leg Linkage for a Legged-Wheeled Balancing Robot |
| 15:45-16:00 | Hybrid Legged-Wheeled Robotic Platforms: Survey on Existing Solutions |
| S9: Planning and Control I / Chair: Teresa Zielinska | |
| 16:00-16:15 | The measure of motion similarity for robotics application |
| 16:15-16:30 | Design of a Minimalistic Torque Actuated Variable Rolling SLIP Leg for Robust Locomotion |
| 16:30-16:45 | Direct Centroidal Control for Balanced Humanoid Locomotion |
| 16:45-17:00 | Decentralized Control Mechanisms for Trunk, Head, Tail–limb Coordination in Quadruped Running |
| 17:00-17:30 | Coffee break |
| S10: Robotics and AI for Automated Infrastructure Inspection and Intervention / Chair: Bryan Bridge | |
| 17:30-17:45 | Confirmation of Variable Diameter TRM Operation |
| 17:45-18:00 | Application of radio frequency identification underwater with magnetic flux leakage testing technique |
| 18:00-18:15 | Robotic deployment of a stabilized shearography unit for wind turbine blade inspection |
| 20:30-22:30 | Dinner Banquet – Grand Hotel Açores Atlântico – Address: Av. Infante Dom Henrique 113 |
| Wednesday 14 September 2022 | |
| 08:30-09:00 | Conference Registration |
| 09:00-10:00 | Pedro Lima – Heterogeneous Teams of UGVs and UAVs for Multipurpose Operations / Chair: Giovanni Muscato |
| S11: Planning and Control II / Chair: José Cascalho | |
| 10:00-10:15 | Adaptation of a Decentralized Controller to Curve Walking in a Hexapod Robot |
| 10:15-10:30 | CPG-based Gait Generator for a Quadruped Robot with sidewalk and turning operations |
| 10:30-10:45 | Semi-autonomous walking control of a hexapod robot based on contact point planning and follow-the-contact-point gait control |
| 10:45-11:00 | Omnidirectional motion control method of quadruped robot based on 3D-CPG oscillator group |
| 11:00-11:30 | Coffee break |
| S12: Planning and Control III / Chair: José Lima | |
| 11:30-11:45 | Evaluation of the work performance of a paddy field weeding robot using disturbance observer |
| 11:45-12:00 | Application of Genetic Algorithm for Vector Field Guidance Optimization in a UAV Collective Circumnavigation Scenario |
| 12:00-12:15 | On The Travelling Salesman Problem with Neighborhoods in a Polygonal World |
| 12:30-13:00 | Closing Session |
| 13:00-14:00 | Lunch |
| 14:30-19:30 | Social Event – Trip to Furnas |
| Thursday 15 September 2022 | |
| 08:30-11:30 | Vulcano competition |